10月30日至11月1日,第十三届全国大学生创新创业年会在重庆举行。我院理科实验班2017级学生吴彦达负责的国家级创新训练计划项目“基于磁流变液的智能汽车线控制动研究”获评年会“我最喜爱项目”,成为入选的20个项目之一;理科实验班2017级学生高传伟负责的国家级创新训练计划项目“仿生柔性机械爪设计及应用”经评审入围本届年会项目展示交流。
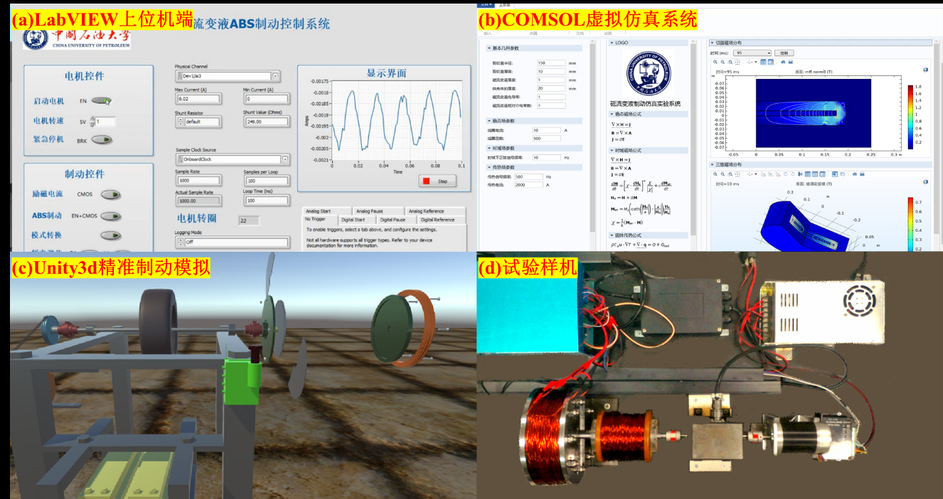
(磁流变液线控制动系统示意图)

(基于磁流变液的智能汽车线控制动研究项目团队)
“基于磁流变液的智能汽车线控制动研究”项目创新性开发了双平台多物理场耦合仿真系统,自主设计制作了外绕双轨线圈盘式制动器,首创性提出励磁线圈反向电流补偿方法,采用闭环PID控制算法精准调控励磁电流,解决了磁流变液线控制动中由于磁滞现象产生剩余制动力这一关键技术难点问题,实现了磁流变液的精准线控制动与主动制动,制动响应灵敏度可较传统线控技术提升60%以上,制动功耗可降低为当前EMB线控技术的1/4。该磁流变液线控制动技术可被广泛应用于智能网联、无人驾驶、新能源汽车等智能控制领域。
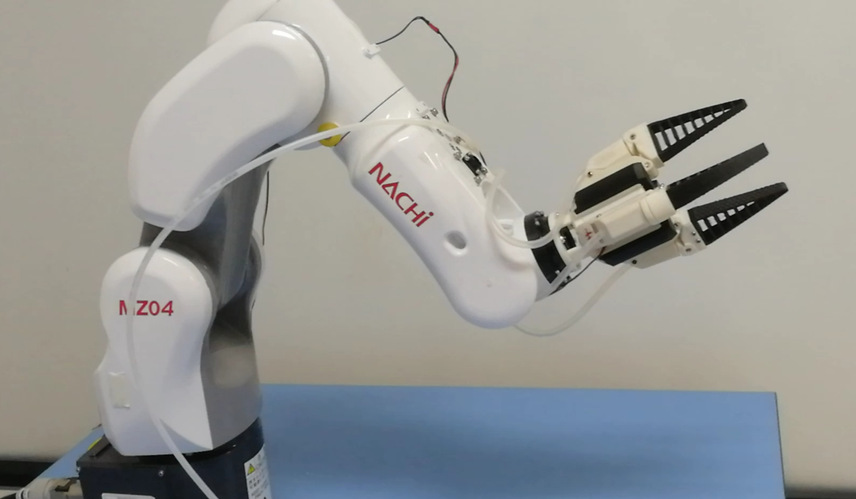
(仿生柔性机械爪设计及应用整体装配展示)
(仿生柔性机械爪设计及应用项目团队)
“仿生柔性机械爪设计及应用”项目设计了一款基于仿生原理的柔性机械爪,柔性夹爪的柔性功能主要依靠其鳍条状结构实现。夹爪贴合面的设计参考了树蛙手掌的仿生学原理,采用凸正六边形设计,从而能够增强夹爪的排水性,提高抓取效果。在结构方面,整体采用模块化设计并加入变体机构,使其适应性更强。此柔性机械爪既克服了传统刚性夹爪的固有缺陷,也突破了普通柔性夹爪适用性小的局限性,对工业智能化的发展具有重要意义。
全国大学生创新创业年会是依托国家“大学生创新创业训练计划”开展的一项重要年度性活动,是全国高校覆盖面最广、影响力最大、学生参与最多、水平最高的盛会之一。本届年会共收悉全国高校推荐项目875项,经过相关学科专家初评、“国创计划”专家工作组复选,遴选出参加年会的学术论文202篇、经验交流项目200项、创业推介项目58项,并最终评选出“我最喜爱项目”20项、“最佳创意项目”21项、优秀学术论文20篇、“最佳创业项目”10项。(院机关 王辰)